�˿�Դ�ɿ�����ҵ����Ŀ�Դ�ɿ�,���ܾ����˳�ʱ����������ƺĽ�,��������Ҫ��Ҿ��зḻ�ĵ��Լ�������ſ�������Ӧ��.
����ҵ���ؼ����нϸߵ�Ҫ��,��ͨ��Ҳ��Ƽ�����.
��Ϊʹ����Ը���.��֮�ٷ������Ƶ�������.
��վ���ṩ��Ӧ�ļ���֧��.
�ٷ���ַ:
http://code.google.com/p/ardupilot-mega-tw/wiki/APM2RCAPM 2.5 �ڳ���ʱ���Ѿ�������ɣ���ֻ��Ҫʹ�� Mission Planner ��������Ҫ�Ĺ̼����ɡ�
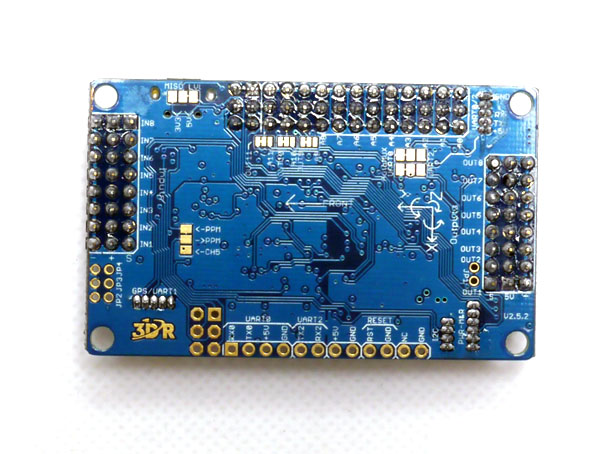
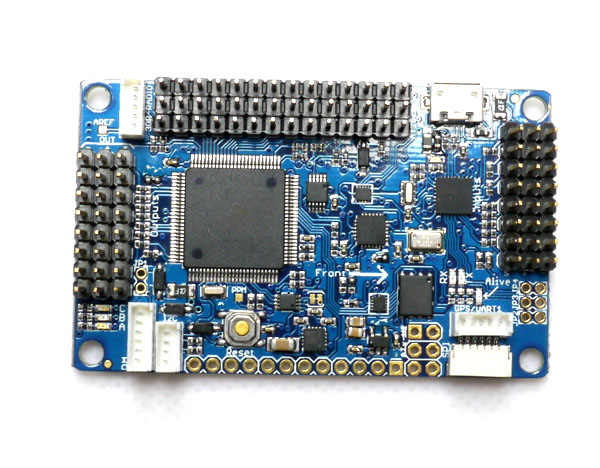
The ArduPilot Mega(APM 2.5) autopilot
ArduPilotMega 2.5 (APM 2)��Ŀǰ�����Ϲ��������������Զ���ʻ���豸ͬʱҲ������˵ġ�
���ܰ���
��ѵĿ���������汾�ֱ�֧Ԯһ�������(ArduPlane)�����������(quads, hex, oct, etc)��ֱ����(ArduCopter)�����涯װ��(ArduRover)��
���趨�������尲װ������Ҫд�κεij�ʽ��(���������Ҫ������ʽ����Ҳ����ʹ����Ƕ�ij�ʽ���ߣ�Arduino)��
ֻ��������Ϳ���Ƴ�����ű���
����֧Ԯ���ٸ�3D���㡣
�ص���ɵ㣬��ij��λ��ͣ��������ģʽ������ֻҪ�ڵ�ͼ����һ�¾��ܹ��÷ɻ��������λ��(�谲װң��ϵͳ)��
�Զ���ɼ����䡣
ǿ���MAVLink Э��֧Ԯ������ʹ��˫������ͨѶ��
ѡ����ѵĵ��湤��վ��Mission Planner �Ĺ��ܰ�������滭�����м�ʱ�����趨��Ӱ�š��ϳ������������������ϼ�¼���ز���
�������ҵƽ̨��֧ԮWindows��Mac��Linux��ʹͼ�λ������Mission Planner�谲װ�Windowsƽ̨(Mac����Parallels��ִ�У�Linux ���� Mono)������������ҵϵͳ�п�ʹ��������ģʽ��
֧Ԯ�Զ���ɡ����估����Ķ���������Ӱ��������ơ�
֧Ԯ�������ġ�hardware-in-the-loop��ģ�⡣
Ӳ��װ�����£�
3������
3������
3��������
�߾�����ѹ��Ӧ��
5Hz GPS ģ��
��ѹ��Ӧ���ɲ������״̬
4Mb�����ϼ�¼�ռ䣬Missions Planner���Զ���¼���҅R����KML
�ڽ����ϰ�ȫ����������ʧȥ���ߵ�Ѷ��ʱ�᷵�ط���ĵط�
ѡ��)���ټ�
(ѡ��)������
����WIKI
�̶���
http://code.google.com/p/ardupilot-mega/wiki/APM2board?wl=zh-Hans
������
http://code.google.com/p/arducopter/wiki/ArduCopter?wl=zh-Hans