

商品描述:
编号:APM252上架/更新:2013-08-13/2018-02-02
此开源飞控是行业最早的开源飞控,尽管经历了长时间大量的完善和改进,但还是需要玩家具有丰富的调试技术经验才可以熟练应用.
对玩家的相关技术有较高的要求,普通玩家不推荐购买.
因为使用相对复杂.加之官方有完善的讨论组.
本站不提供相应的技术支持.
官方地址:
http://code.google.com/p/ardupilot-mega-tw/wiki/APM2RC
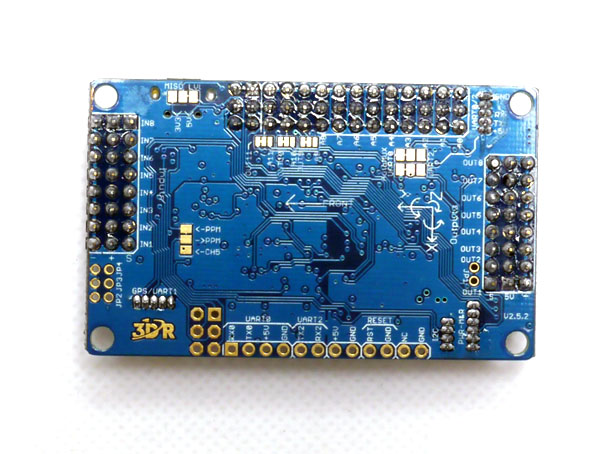
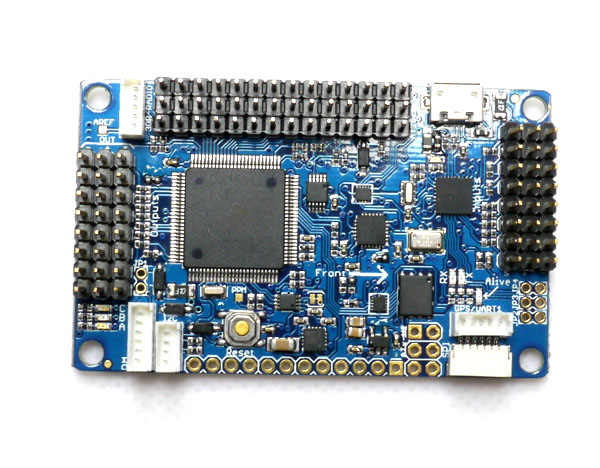
APM 2.5 在出厂时就已经焊接完成,你只需要使用 Mission Planner 加载你想要的固件即可。
The ArduPilot Mega(APM 2.5) autopilot
功能包括
免费的开放码韧体版本分别支援一般飞行器(ArduPlane)、多轴飞行器(quads, hex, oct, etc)、直升机(ArduCopter)及地面动装置(ArduRover)。
简单的设定程序及韧体安装,不需要写任何的程式码(但如果你想要修正程式码你也可以使用内嵌的程式工具:Arduino)。
只需点击滑鼠就可设计出任务脚本。
可以支援数百个3D航点。
回到起飞点,在某个位置停悬、跟随模式,或者只要在地图上轻一下就能够让飞机飞至这个位置(需安装遥测系统)。
自动起飞及降落。
强大的MAVLink 协定支援飞行中使用双向无线通讯。
选用免费的地面工作站:Mission Planner 的功能包含任务规画、空中即时参数设定、影像播放、合成语音、及完整的资料记录与重播。
跨各种作业平台,支援Windows、Mac及Linux,使图形化介面的Mission Planner需安装於Windows平台(Mac可在Parallels下执行,Linux 可用 Mono),在其他的作业系统中可使用命令列模式。
支援自动起飞、降落及特殊的动作命令如影像及相机控制。
支援飞行器的「hardware-in-the-loop」模拟。
硬体装置如下:
3维陀螺仪
3维加速器
3维电子罗盘
高精度气压感应器
5Hz GPS 模组
电压感应器可测量电池状态
4Mb的资料记录空间,Missions Planner会自动记录并且匯出至KML
内建故障安全处理器,当失去无线电讯号时会返回发射的地方
选配)空速计
(选配)电流计
中文WIKI
固定翼
http://code.google.com/p/ardupilot-mega/wiki/APM2board?wl=zh-Hans
多旋翼
http://code.google.com/p/arducopter/wiki/ArduCopter?wl=zh-Hans
技术参数:
产品名称:开源 APM2.5 多模式飞控/支持 多旋翼 固定翼 直升机厂家编号:APM252
硬件版本: 2.5.2
支持飞行器: 固定翼 直升机 多旋翼
支持地面站操作: 支持,需另外配置数传电台
GPS 速度: 5Hz
所含附件:
包含:1 x 主控
1 x 5hz gps
1 x 配线包