商品描述:
编号:APM-28上架/更新:2020-09-04/2022-06-10
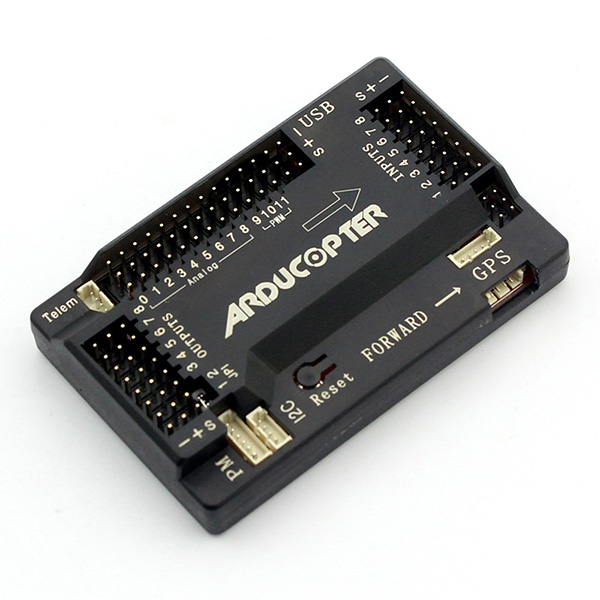
APM2.8 如何切换使用内外罗盘:盖上跳线帽就是内置罗盘,去掉跳线帽就是使用外置罗盘。
罗盘远离电源线就不会干扰
关于jp1 断开跳线帽可用电源模块供电 jp1是连接飞控电源和电调5v电源输出的
APM是开源飞控,需要亲们借助伟大的互联网好好专研,不提供技术支持哦!
参考资料: 中文wiki:
固定翼:http://code.google.com/p/ardupilot-mega/wiki/home?wl=zh-Hans
多轴飞行器/直升机:http://code.google.com/p/arducopter/wiki/ArduCopter?wl=zh-Hans
车船:http://code.google.com/p/ardurover/wiki/Overview?tm=6
APM 官网:http://ardupilot.com/
APM 中文教程:http://copter.ardupilot.cn/
APM2.8 百宝箱:http://pan.baidu.com/s/1c0txwEO
APM 短接JP1后,不可同时电调供电和USB供电,否则可能就会导致板子发烫,烧坏 ( 不按产品要求操作烧坏掉需买家自己处理 ,不能退换货,自行焊接JP1烧坏的,不享受保修!)
飞控本身没焊接JP1的,推荐用电源模块供电。
1. DF13-4P的I2C外置罗盘接口 替换V2.52版的老的1.0mm 6P SM06B GPS接口:
将DF13-5P的GPS接口与外置罗盘接口放置一起,更方便GPS与外置罗盘的连接。原版DF13-5P GPS接口与SM06B GPS接口功能复用,没有意义;
2. 多功能MUX接口 替换V2.52的I2C接口:
该接口可由用户自己通过板子背面的焊盘自由配置功能输出,UART0,UART2,I2C,OSD可选,默认为OSD接口,避免2.52版要同时使用数传和OSD时,需要使用Y线分离接口的方案。改进后的OSD接口与数传同时使用时,由于加入了隔离电阻,更有效的避免了对数传的干扰;
3. 新版耐压比V2.52版高,达到了16V:
V2.52版3.3V供电使用TPS79133,耐压6V,输出电流100mA,需要同时向六个(包括板载罗盘、陀螺仪、气压计和3个逻辑电平转换)IC供电,供电能力略显不足,比较容易烧,且由于TPS79133是低电压使能,无法使用其它LDO芯片代换。新版V2.8.0则改用美国半的LP2985-3.3,耐压达到了16V,增加了可靠性,减少因电压问题出现Bad Gyro health概率。
4. 跳线帽选择 替换 V2.5.2版的内外罗盘选择焊盘:
V2.5.2如果要使用外置罗盘,需将板上一个连接内置罗盘的焊盘割开,如果要改回内置罗盘,又要重新焊上,非常不方便。V2.8.0改进了设计,使用跳线帽进行选择,找到板上标记MAG的排针,插上跳线帽为内置罗盘,拔掉跳线帽即为外置罗盘。
高清展示本店APM焊接工艺,本店APM飞控除接插件需人工焊接外,其余均为机器焊接,工艺要求严格,即使是焊接难度zui大体积zui小的TXB0104,你也看到焊点非常饱满,关键的MPU6000,侧面焊点也非常饱满,确保了连接的可靠,普通工艺只能保证底部焊盘连接,MPU6000类似悬浮与PCB之上
5. V2.8.0增加了一个47uF的钽电容:
V2.5.2版的主电源滤波电路仅使用了多个0.1uF组成的高频分量滤波电路过滤高频干扰,整块板没有一个大容量的电容用来过滤低频分量的纹波,V2.8.0增加了一个47uF的钽电容,改善APM板载芯片供电的稳定性;
6. 新版V2.8.0的电平设计无失误:
V2.52版板载的AT45DB161D是一款3.3V供电的FLASH存储器,主控ATMEGA2560则是5V供电,为兼容它们的数据电平,同时也是为了保护AT45DB161D免受2560的5V高电平冲击,它们之间使用了一片双电源供电的TXB0104进行电平转换,但由于设计失误,端口A原本接低电平的,接了高电平的2560,B端口原本应该接高电平的则接了低电平,A和B刚好反了一下。根据TXB0104的date sheet手册,端口A的追踪电平范围为1.2V-3.6V,接了5V电平的2560显然超出了它的ji限,而端口B的追踪电平虽然是1.65-5.5V,但因此它是5V供电,反而接了低电压的AT45DB161,显然对AT45DB161是非常不利的.新版V2.8.0更正了这个设计失误。
技术参数:
产品名称:厂家编号:
所含附件:
1 x APM2.8 飞控1 x 连接线