










| 重量 | 3290 g(含两块电池,不含云台相机) |
|---|---|
| 轴距 ( 不含桨) | 605 mm(降落模式) |
| 最大起飞重量 | 4000 g |
| 最大起飞海拔高度 | 普通桨:2500 m;高原桨:5000 m |
| 最大飞行时间 | 27 min(使用Zenmuse X4S) |
| 最大俯仰角度 | P模式:35°(前视视觉系统启用:25°); A 模式:35°;S 模式:40° |
| 最大上升速度 | P模式/A 模式:5 m/s;S 模式:6 m/s |
| 最大下降速度 | 垂直:4 m/s;斜下降:4 - 9 m/s(App 中可设置,默认:4 m/s) |
| 最大水平飞行速度 | 108 km/h |
| GPS 悬停精度 | 垂直:±0.5 m(下视视觉系统启用:±0.1 m); 水平:±1.5 m(下视视觉系统启用:±0.3 m) |
| 推荐工作环境温度 | -10 ℃至 40 ℃ |
| 飞行速度测量范围 | <10 m/s(高度 2 m,光照充足) |
|---|---|
| 高度测量范围 | <10 m |
| 精确悬停范围 | <10 m |
| 使用环境 | 表面有丰富纹理,光照条件充足(>15 lux,室内日光灯正常照射环境) |
| 超声波高度测量范围 | 10 - 500 cm |
| 超声波使用环境 | 非吸音材质、硬质地面(厚地毯性能会有衰减) |
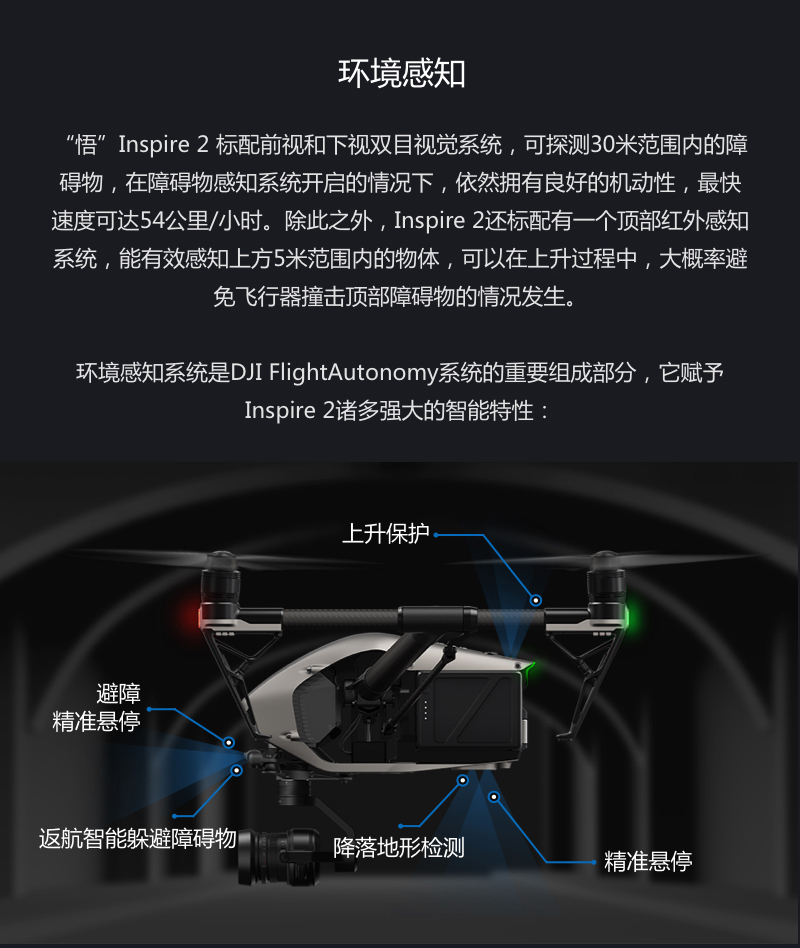
| 障碍物感知范围 | 0 - 5 m |
|---|---|
| FOV | ±5° |
| 使用环境 | 大尺寸、漫反射障碍物 |
| 电压 | 26.1 V |
|---|---|
| 额定功率 | 180 W |
| 输入电压 | 26.1 V |
|---|---|
| 输入电流 | 6.9 A |
| 角度抖动量 | ±0.01° |
|---|---|
| 可控转动范围 | 俯仰:-130°至+40°;横滚:±20°;水平:±320° |
| 最大控制转速 | 俯仰:90°/s;横滚:90°/s;水平:90°/s |
| 障碍物感知范围 | 0.7 - 30 m; |
|---|---|
| FOV | 水平 60°,垂直 54° |
| 使用环境 | 表面有丰富纹理,光照条件充足(>15 lux,室内日光灯正常照射环境) |
| 工作频率 | 2.400 - 2.483 GHz;5.725 - 5.850 GHz |
|---|---|
| 最大信号有效距离 | 2.4 GHz:7 km(FCC);3.5 km(CE);4 km(SRRC) |
| (无干扰、无遮挡) | 5.8 GHz:7 km(FCC);2 km(CE);5 km(SRRC) |
| 发射功率 (EIRP) | 2.4 GHz:26 dBm(FCC);17 dBm(CE);20 dBm(SRRC) 5.8 GHz:28 dBm(FCC);14 dBm(CE);20 dBm(SRRC) |
| 内置电池 | 6000 mAh 2S LiPo |
| 功耗 | 9 W(不给移动设备充电状态) |
| USB 接口供电电流/ 电压 | iOS:1 A @ 5.2 V (最大);Android:1.5 A @ 5.2 V (最大) |
| 工作环境温度 | -10 ℃ 至 40 ℃ |
| 容量 | 4280 mAh |
|---|---|
| 电压 | 22.8 V |
| 电池类型 | LiPo 6S |
| 能量 | 97.58 Wh |
| 电池整体重量 | 约515g |
| 充电环境温度 | 5 ℃ 至 40 ℃ |
| 电池使用温度 | -10 ℃ 至 40 ℃ |
| 最大充电功率 | 180 W |